En fyrbent robot får rymdingenjörer att tänka om
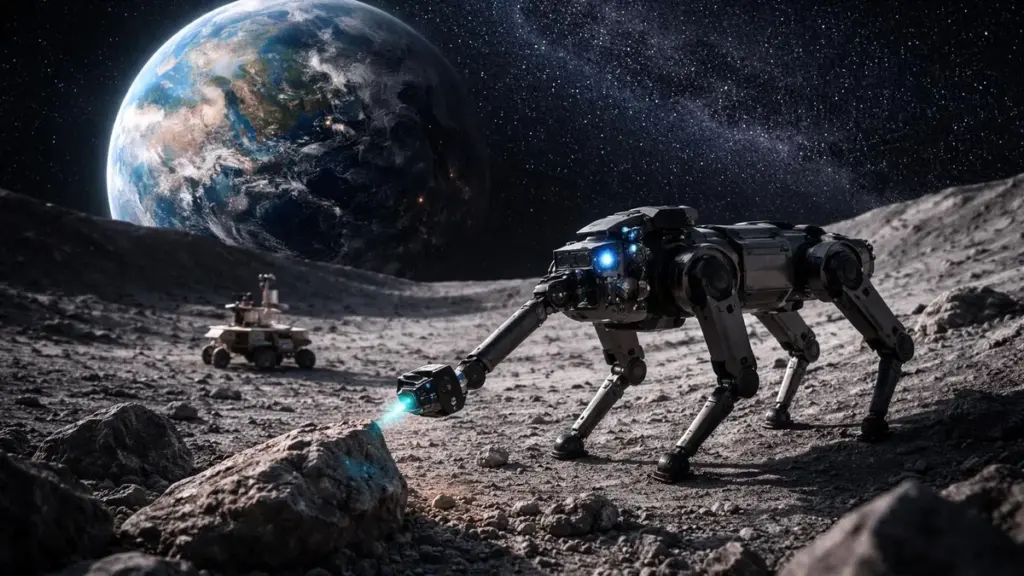
En robot med fyra ben rör sig snabbare än klassiska rovers och utför självständiga, exakta mineralanalyser på plats. I en testmiljö som efterliknar mån- och Marslandskap demonstrerar roboten ANYmal hur framtida uppdrag kan arbeta mycket smartare och effektivare. Det som traditionella rovers behöver upp till tre kvart för klarar ANYmal på några minuter.
Varför rymdorganisationer desperat söker snabbare robotar
Nuvarande Marsrovers är teknologiska mästerverk — men de är långsamma. En bra dag tillryggalägger de några hundra meter. Det beror inte på svaga motorer utan snarare på avståndet till Jorden. Ett kommando kan ta upp till 22 minuter att nå fram, och svaret tar lika lång tid tillbaka. Varje sväng, varje borrning och varje bild kräver tålamod.
På Månen ser utmaningen annorlunda ut. Kommunikationen är snabbare, men ytan är full av kratrar, sluttningar av löst grus och vassa klippor. Hjul fastnar, glider eller skadas. Ett fordon på ben har genast en fördel här. Det är precis där ANYmal kliver in — en robothund särskilt anpassad för tuffa, främmande terränger.
Genom att flytta mer autonomi ut till ytan på Månen och Mars försvinner en stor del av väntetiden mellan människa och maskin.
ANYmal: robothunden med vetenskaplig nos
ANYmal är utvecklad vid ETH Zürich och mäter cirka en meter i längden. Den vilar på fyra ledade ben som kan röra sig oberoende av varandra. Därmed stiger den över stenar, klättrar upp på små avsatser och korrigerar snabbt sin balans när underlaget ändras. Där en hjulrover kör runt eller stannar hittar ANYmal bara ett nytt stödpunkt.
Vetenskapliga instrument på en robotarm
För rymdtesterna fick roboten monterad en extra arm — en sorts mekanisk snabel — med vilken den noggrant kan närma sig en klippa eller sten. I änden av denna arm sitter två kompakta mätinstrument:
- MICRO: en mikroskopisk kamera som kartlägger stenytor i mycket liten skala, tillräckligt fint för att skilja mellan olika mineral.
- Raman-spektrometer: en bärbar apparat som med hjälp av en laser härleder sammansättningen av ett prov utifrån den reflekterade ljussignalen.
Denna kombination ger ANYmal en tydlig fördel: den behöver inte samla upp prover, lagra dem och transportera dem till ett laboratorium. Analysen sker direkt på plats med omedelbara resultat till uppdragsteamet.
Identifierar bergarter som om den gått där i åratal
Testerna ägde rum i det så kallade Marslaboratoriet vid Basels universitet. Det är en inomhusterräng med grussluttningar, klippblock och jordsammansättningar som påminner om dem man finner på Mars eller Månen. Inom denna konstgjorda ”planetära” miljö lyckades ANYmal identifiera flera typer av bergarter.
Följande mineral framgick bland annat av mätningarna:
- Gips – ofta förknippat med vattenrika förhållanden
- Karbonater – intressanta som möjliga spår efter gamla vattenmiljöer
- Basalt – magmatisk bergart, typisk för vulkanisk aktivitet
- Dunit – rik på olivin, kopplad till djupa lager i en planets mantel
- Anortosit – karakteristisk för gamla månhögländer
För forskare är just denna typ av mineralogisk information avgörande. Den ger ledtrådar om var vatten en gång har funnits, hur gammalt ett område är och om en plats är lovande för vidare undersökning.
Självständigt arbetar ANYmal tre gånger så snabbt
Under ledning av forskaren Gabriela Ligeza — nu anställd hos den europeiska rymdorganisationen ESA — jämförde teamet två arbetsmetoder med robothunden. Skillnaden var slående.
Scenario 1: människan styr varje steg
I den första uppställningen ledde en forskare roboten steg för steg. ANYmal fick ett mål, gick dit, utförde mätningarna och väntade sedan på nya instruktioner till nästa punkt. Mellan val av mål, avsändning av kommandon och kontroll av resultat uppstod varje gång en paus.
Detta tillvägagångssätt krävde 41 minuter för att analysera uppsättningen av bergarter. Det verkar acceptabelt i ett laboratorium, men översatt till verkliga rymdförhållanden — med kommunikationsförseningar och begränsad energi — sväller planeringen snabbt upp.
Scenario 2: roboten planerar själv sin rutt
I den andra uppställningen fick ANYmal flera intressanta punkter angivna på en gång. Därefter bestämde mjukvaran själv ordningsföljden, valde rutter längs hinder och växlade automatiskt mellan att gå, sikta, mäta och fortsätta.
Tidsbesparingen var markant: samma uppgifter tog nu bara 12 till 23 minuter. Människan behövde ingripa mycket mer sällan och framför allt inte skicka ett nytt kommando efter varje enskild mätning.
Med en semiautonom arbetsmetod klarar en fyrbent robot på ett kvarter det som ett traditionellt styrt uppdrag använder nästan tre kvart på.
Vad en sådan robothund kan betyda för Månen
För framtida månbaser handlar mycket om råvaror. Vattenis i kratrar, metaller i berglager och mineral för byggmaterial gör det möjligt att producera mer lokalt istället för att medföra allt från Jorden.
En robot med ben och integrerad mätutrustning kan vara användbar på tre fronter:
- Snabb kartläggning av kratrar: i polarområden där det möjligen finns is måste en robot säkert kunna röra sig längs branta kanter och smuliga sluttningar.
- Lokal karta över intressanta zoner: genom att analysera bergarter direkt uppstår snabbt en överblick över lovande platser för gruvdrift eller vetenskap.
- Kartläggning av risker: roboten kan identifiera sprickor i undergrunden, stora block och instabila zoner före bemannade uppdrag.
Med dessa uppgifter kan en landningsplats väljas mer exakt, och mänskliga astronauter kan dirigeras målinriktat mot rätt områden istället för att slösa dyrbar tid på att leta.
På jakt efter livsspår på Mars
På Mars skiftar prioriteten från råvaror mot dåtid och möjligt nuvarande liv. Forskare letar efter så kallade biosignaturer — kemiska och mineralogiska mönster som passar biologiska processer, såsom bestämda organiska molekyler eller typiska strukturer i sedimentbergarter.
Raman-spektrometern på ANYmal är särskilt lämplig för att upptäcka sådana mönster. Genom att rikta en laser mot en klippa ger det reflekterade ljuset ett slags fingeravtryck av de närvarande molekylerna.
| Mätningens syfte | Vad Raman-spektrometern avslöjar |
|---|---|
| Hitta vattenrelaterade mineral | Signaler från sulfater, karbonater och hydratfaser |
| Spåra eventuella biosignaturer | Spår av specifika organiska föreningar eller mönster i kolstrukturer |
| Rekonstruera geologisk historia | Information om vulkanisk aktivitet, avlagringslager och bergartsålder |
Genom att snabbare analysera flera bergarter i ett område kan ett uppdrag med begränsad livslängd mycket bättre bedöma vilka platser som är lovande för borrningar eller provtagning för hemtransport.
Svärmar av gående robotar som framtidsbild
ANYmal står inte ensam. Andra forskargrupper utvecklar små gående robotar som i grupper — som en sorts svärm — kan dela upp ett större område mellan sig. En robot inspekterar till exempel kraterkanten, en annan undersöker botten och en tredje kontrollerar en klippavsats lite längre bort.
Genom att dela data och koordinera rutter sinsemellan skulle sådana lag kunna kartlägga en planetyta i högt tempo. Erfarenheterna med ANYmal visar att tre ingredienser är avgörande i det sammanhanget:
- Fyrbent eller flerbent underrede som kan hantera hinder
- Miniatyrisering av avancerade mätinstrument
- Intelligent mjukvara som fattar lokala beslut utan konstant styrning från Jorden
Vad innebär detta för framtida uppdrag?
För rymdorganisationer som ESA och NASA blir frågan mer pressande: vilka uppgifter planeras fortfarande på Jorden, och vilka överlåts till autonoma robotar på Månen eller Mars? Större självständighet på ytan kräver tillförlitliga algoritmer som kan hantera oväntade situationer — till exempel en kollapsande klippvägg eller en sanddyn som ser annorlunda ut än modellen förutspådde.
Samtidigt ger den autonomin energi- och tidsbesparingar. Kortare väntetid på kommandon innebär att solpaneler och batterier utnyttjas mer effektivt — något som kan vara avgörande vid långvariga polarnatts-uppdrag på Månen.
För den som undrar om en sådan robothund skulle kunna gå sida vid sida med en astronaut: tekniskt sett ligger det fortfarande närmare verkligheten. Föreställ dig scenarier där en människa fastställer den stora bilden för en expedition, medan flera robotar självständigt tar små omvägar, kontrollerar prover och skannar farliga terrängsektioner i förväg.
Tillämpningarna begränsar sig inte till rymdfart. Teknologier för balans, autonom navigering och robusta sensorer blir likaledes intressanta för sök- och räddningsinsatser på Jorden, inspektioner i gruvor eller utforskning av vulkaniska områden som människor svårt kan nå. I den bemärkelsen fungerar mån- och Marsmiljön som den ultimata provplatsen för en ny generation av terrängrobotrar.